
FCOS 简介
FCOS,全称 Fully-Convolutional One-Stage Object Detection,在2019年由澳大利亚的研究人员提出。在当时的 CV 领域,主流目标检测模型如 RetinaNet, SSD, YOLOv3 和 Faster R-CNN 都是 Anchor-Based,即先生成初始预测框再进行调整。Anchor-Based 的模型的性能受到 Anchor 大小和比例影响非常大,而且为了保证检测的高 Recall 率,往往需要在原图中放置超过 180K 个 Anchor box,使得计算代价非常大。
为此,研究人员提出了 FCOS,即不预先生成 Anchor box,只基于大量的卷积层确定预测框的位置,从而避免了 Anchor-Based 模型带来的问题。同时,他们提出了 Centerness 的概念,来弥补像素点与对应 box 中心的误差。
FCOS 三层结构
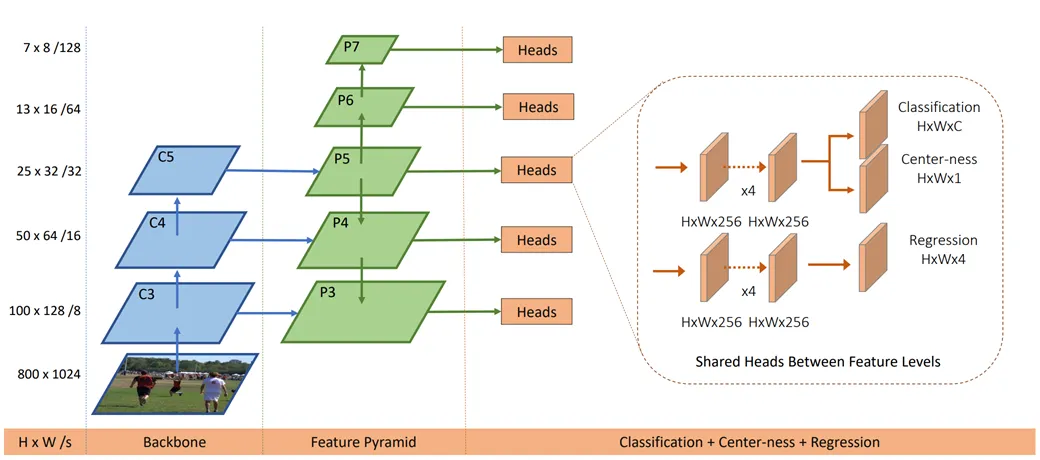
如图所示,整个模型一共可以分为3大层:Backbone, Feature Pyramid (FPN) 和 Head 输出端。
CAUTION以下实现的只是简化版的 FCOS,例如减少了卷积层,删去了 p6,p7,原模型详见文末链接
Backbone
Backbone 由大量的卷积和池化层构成,采用的卷积架构是 RegNetX-400MF。由输入图像到 c3 经过了 Convolution---MaxPooling---Convolution---Maxpooling---Convolution---Maxpooling 的过程,每次的卷积都使用 的卷积核,stride=1, padding=1,因此卷积不改变原图尺寸,使用的 最大池化每次使图像宽、高减半。c3 的宽、高为原图的 ,c4 为 ,c5 为 。
FPN
FPN 层横向连接了 c3,c4,c5 层,并通过卷积进一步提取特征。为了简化模型,删去了原 FPN 的 p6, p7 层,只保留 p3,p4,p5层,构建过程如下:
- c5 层通过一个 的横向卷积层和一个 的输出卷积层得到 p5 层。
- c4 层同样先通过一个 的横向卷积层得到中间层(记为temp),之后 temp 和上采样之后的 p5 层叠加,再经过一个 的输出卷积层得到 p4 层。
- c3 层同理,先横向卷积得到中间层,再与下采样之后的 p4 层叠加,通过输出卷积层得到 p3 层。
将 Backbone 层和 FPN 层合起来定义一个类 DetectorBackboneWithFPN,Python代码实现如下:
class DetectorBackboneWithFPN(nn.Module):
def __init__(self, out_channels: int):
super().__init__()
self.out_channels = out_channels
_cnn = models.regnet_x_400mf(pretrained=True)
self.backbone = feature_extraction.create_feature_extractor(
_cnn,
return_nodes={
"trunk_output.block2": "c3",
"trunk_output.block3": "c4",
"trunk_output.block4": "c5",
},
)
dummy_out = self.backbone(torch.randn(2, 3, 224, 224))
dummy_out_shapes = [(key, value.shape) for key, value in dummy_out.items()]
print("For dummy input images with shape: (2, 3, 224, 224)")
for level_name, feature_shape in dummy_out_shapes:
print(f"Shape of {level_name} features: {feature_shape}")
self.fpn_params = nn.ModuleDict()
c3_channels = dummy_out["c3"].shape[1]
c4_channels = dummy_out["c4"].shape[1]
c5_channels = dummy_out["c5"].shape[1]
self.fpn_params["lateral_c3"] = nn.Conv2d(c3_channels, out_channels, kernel_size=1, stride=1, padding=0)
self.fpn_params["lateral_c4"] = nn.Conv2d(c4_channels, out_channels, kernel_size=1, stride=1, padding=0)
self.fpn_params["lateral_c5"] = nn.Conv2d(c5_channels, out_channels, kernel_size=1, stride=1, padding=0)
self.fpn_params["output_p3"] = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1)
self.fpn_params["output_p4"] = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1)
self.fpn_params["output_p5"] = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1)
@property
def fpn_strides(self):
return {"p3": 8, "p4": 16, "p5": 32}
def forward(self, images: torch.Tensor):
backbone_feats = self.backbone(images)
fpn_feats = {"p3": None, "p4": None, "p5": None}
c3, c4, c5 = backbone_feats["c3"], backbone_feats["c4"], backbone_feats["c5"]
lateral_c3 = self.fpn_params["lateral_c3"](c3)
lateral_c4 = self.fpn_params["lateral_c4"](c4)
lateral_c5 = self.fpn_params["lateral_c5"](c5)
p5 = self.fpn_params["output_p5"](lateral_c5)
p4 = lateral_c4 + F.interpolate(p5, size=lateral_c4.shape[2:], mode="nearest")
p4 = self.fpn_params["output_p4"](p4)
p3 = lateral_c3 + F.interpolate(p4, size=lateral_c3.shape[2:], mode="nearest")
p3 = self.fpn_params["output_p3"](p3)
fpn_feats = {"p3": p3, "p4": p4, "p5": p5}
return fpn_feats其中,forward 方法的输入是初始图像,输出是经过 Backbone 和 FPN 之后的 p3,p4,p5三个特征图。
TIP
- 为什么需要三个维度的特征图?
- 要检测的目标大小不一,根据大小将其划分到对应的 p 层,即较小的划分到 p3,较大的划分到 p5 进行检测,从而更全面地检测目标。
Head 输出端
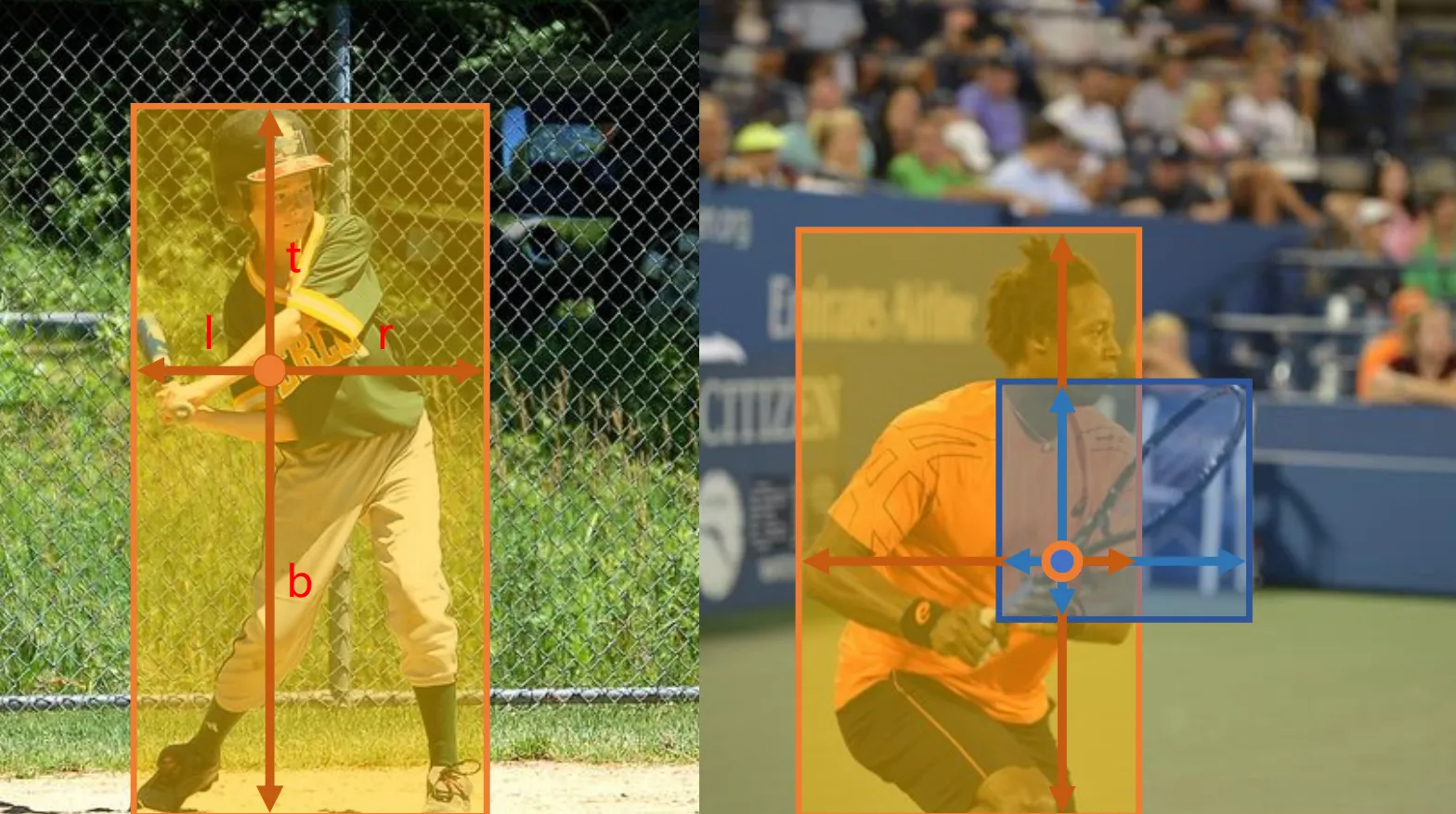
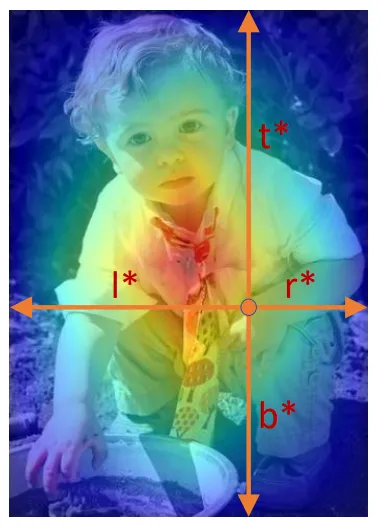
Head 用来实现对目标检测结果的输出。原论文中 Head 共有5个,这里减为3个,且共享权重矩阵。每个 Head 的结构都是:首先4个卷积层,从 p 层中进一步提取特征,之后分为3个分支:Classification 用于确定预测框中物体的标签(例如,是足球还是自行车),Center-ness 用于量化中心度,对应每个像素点是一个常数,Regression 用于确定预测框的大小,是一个4维向量 ,分别对应中心距左、上、右、下边的距离。
代码实现如下:
class FCOSPredictionNetwork(nn.Module):
def __init__(
self, num_classes: int, in_channels: int, stem_channels: List[int]
):
super().__init__()
stem_cls = []
stem_box = []
prev_channels = in_channels
for curr_channels in stem_channels:
stem_cls.append(nn.Conv2d(prev_channels, curr_channels, kernel_size=1, stride=1, padding=0))
stem_cls.append(nn.ReLU(inplace=True))
stem_box.append(nn.Conv2d(prev_channels, curr_channels, kernel_size=1, stride=1, padding=0))
stem_box.append(nn.ReLU(inplace=True))
prev_channels = curr_channels
for layer in stem_box + stem_cls:
if isinstance(layer, nn.Conv2d):
nn.init.normal_(layer.weight, mean=0, std=0.01)
nn.init.constant_(layer.bias, 0)
self.stem_cls = nn.Sequential(*stem_cls)
self.stem_box = nn.Sequential(*stem_box)
self.pred_cls = nn.Conv2d(prev_channels, num_classes, kernel_size=3, stride=1, padding=1)
self.pred_box = nn.Conv2d(prev_channels, 4, kernel_size=3, stride=1, padding=1)
self.pred_ctr = nn.Conv2d(prev_channels, 1, kernel_size=3, stride=1, padding=1)
torch.nn.init.constant_(self.pred_cls.bias, -math.log(99))
def forward(self, feats_per_fpn_level: TensorDict) -> List[TensorDict]:
class_logits = {}
boxreg_deltas = {}
centerness_logits = {}
for level_name, feat in feats_per_fpn_level.items():
cls_feat = self.stem_cls(feat)
cls_logits = self.pred_cls(cls_feat)
ctr_logits = self.pred_ctr(cls_feat)
box_feat = self.stem_box(feat)
box_deltas = self.pred_box(box_feat)
batch_size, _, H, W = cls_logits.shape
class_logits[level_name] = cls_logits.permute(0, 2, 3, 1).reshape(batch_size, -1, self.pred_cls.out_channels)
boxreg_deltas[level_name] = box_deltas.permute(0, 2, 3, 1).reshape(batch_size, -1, 4)
centerness_logits[level_name] = ctr_logits.permute(0, 2, 3, 1).reshape(batch_size, -1, 1)
return [class_logits, boxreg_deltas, centerness_logits]FCOS 训练过程
FCOS 的训练大概可以分为4个阶段:给每一个坐标点分配 GT 框(即真实值),匹配坐标点与 GT Box,计算 Delta 距离和计算中心度。
分配 GT 框
GT 框,即 Ground-Truth target,是输入中给定的5D向量,形状为 (x1, y1, x2, y2, C),其中 (x1, y1) 为左上角坐标,(x2, y2) 为右下角坐标,C 为分类标签。为了实现 GT box 的分配,首先需要将特征图中的坐标 (i, j) 转换为输入图中的坐标 (stride * (i + 0.5), stride * (j + 0.5)),函数实现如下:
def get_fpn_location_coords(
shape_per_fpn_level: Dict[str, Tuple],
strides_per_fpn_level: Dict[str, int],
dtype: torch.dtype = torch.float32,
device: str = "cpu",
) -> Dict[str, torch.Tensor]:
location_coords = {
level_name: None for level_name, _ in shape_per_fpn_level.items()
}
for level_name, feat_shape in shape_per_fpn_level.items():
level_stride = strides_per_fpn_level[level_name]
H, W = feat_shape[2], feat_shape[3]
i_indices = torch.arange(H, dtype=dtype, device=device)
j_indices = torch.arange(W, dtype=dtype, device=device)
i_grid, j_grid = torch.meshgrid(i_indices, j_indices, indexing="ij")
xc = (i_grid + 0.5) * level_stride
yc = (j_grid + 0.5) * level_stride
location_coords[level_name] = torch.stack([xc.flatten(), yc.flatten()], dim=1)
return location_coords具体效果如下:
p3 层:
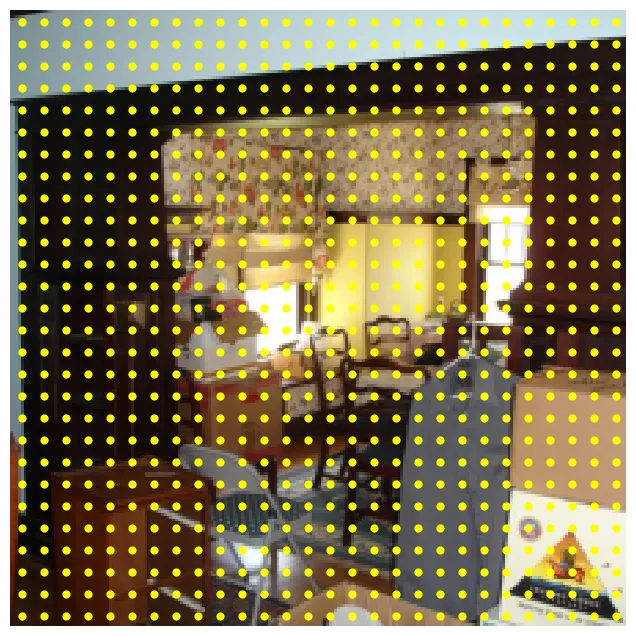
p4 层:

p5 层:

TIP可以发现,由于 p3,p4,p5 层的 stride 依次增大,特征图中相同间隔的点在 p3,p4,p5 层中间隔也会依次增大,显得更加稀疏。
匹配坐标点与 GT Box
在匹配过程中,有3条规则需要遵守,这也是 GT box 的分配原则:
如果坐标点 在 GT box 中,那么他们就互相匹配。如果出现一个坐标点在两个 Box 中的情况,那么将会优先选择较小的那个。
如果一个坐标点 没有出现在任何一个 GT box 中,那么它就被标记为背景。
FPN 的不同层负责处理不同大小的 GT box,即 p5 负责处理较大的,p3 负责处理较小的。
因此,最终每一个坐标点都会匹配一个 GT box 和一个相应的分类标签,对应一个5维向量 (x1, y1, x2, y2, C)。如果坐标点是背景,那么它对应的向量就是 (-1, -1, -1, -1, -1)。
函数实现如下:
@torch.no_grad()
def fcos_match_locations_to_gt(
locations_per_fpn_level: TensorDict,
strides_per_fpn_level: Dict[str, int],
gt_boxes: torch.Tensor,
) -> TensorDict:
matched_gt_boxes = {
level_name: None for level_name in locations_per_fpn_level.keys()
}
for level_name, centers in locations_per_fpn_level.items():
stride = strides_per_fpn_level[level_name]
x, y = centers.unsqueeze(dim=2).unbind(dim=1)
x0, y0, x1, y1 = gt_boxes[:, :4].unsqueeze(dim=0).unbind(dim=2)
pairwise_dist = torch.stack([x - x0, y - y0, x1 - x, y1 - y], dim=2)
pairwise_dist = pairwise_dist.permute(1, 0, 2)
match_matrix = pairwise_dist.min(dim=2).values > 0
pairwise_dist = pairwise_dist.max(dim=2).values
lower_bound = stride * 4 if level_name != "p3" else 0
upper_bound = stride * 8 if level_name != "p5" else float("inf")
match_matrix &= (pairwise_dist > lower_bound) & (
pairwise_dist < upper_bound
)
gt_areas = (gt_boxes[:, 2] - gt_boxes[:, 0]) * (
gt_boxes[:, 3] - gt_boxes[:, 1]
)
match_matrix = match_matrix.to(torch.float32)
match_matrix *= 1e8 - gt_areas[:, None]
match_quality, matched_idxs = match_matrix.max(dim=0)
matched_idxs[match_quality < 1e-5] = -1
matched_boxes_this_level = gt_boxes[matched_idxs.clip(min=0)]
matched_boxes_this_level[matched_idxs < 0, :] = -1
matched_gt_boxes[level_name] = matched_boxes_this_level
return matched_gt_boxes实现效果如下:
计算 Delta 距离
NOTE
- 为什么不使用绝对距离,要引入 Delta 距离?
- 绝对距离往往数值较大,易引起梯度爆炸,需要进行标准化。
Delta 距离,也称 LTRB regression target,定义如下:
其中,加有 * 的是 Delta 距离,(xc, yc) 是中心点的坐标,(x1, y1, x2, y2) 是 GT 边界框的坐标。
以下两个函数分别实现了从实际距离到 Delta 距离的转换,和 Delta 距离到实际距离的转换:
def fcos_get_deltas_from_locations(
locations: torch.Tensor, gt_boxes: torch.Tensor, stride: int
) -> torch.Tensor:
deltas_list = []
for actual_loc, gt_loc in zip(locations, gt_boxes):
if gt_loc[0] == -1:
deltas_list.append(torch.tensor([-1, -1, -1, -1], device=locations.device))
else:
left = (actual_loc[0] - gt_loc[0]) / stride
top = (actual_loc[1] - gt_loc[1]) / stride
right = (gt_loc[2] - actual_loc[0]) / stride
bottom = (gt_loc[3] - actual_loc[1]) / stride
deltas_list.append(torch.tensor([left, top, right, bottom], device=locations.device))
deltas = torch.stack(deltas_list, dim=0)
return deltasdef fcos_apply_deltas_to_locations(
deltas: torch.Tensor, locations: torch.Tensor, stride: int
) -> torch.Tensor:
output_boxes_list = []
for delta_loc, center_loc in zip(deltas, locations):
if delta_loc[0] == -1:
output_boxes_list.append(torch.tensor([locations[0][0], locations[0][1], locations[0][0], locations[0][1]], device=deltas.device))
else:
x1 = center_loc[0] - delta_loc[0] * stride
y1 = center_loc[1] - delta_loc[1] * stride
x2 = center_loc[0] + delta_loc[2] * stride
y2 = center_loc[1] + delta_loc[3] * stride
x1 = max(0, x1)
y1 = max(0, y1)
x2 = max(0, x2)
y2 = max(0, y2)
output_boxes_list.append(torch.tensor([x1, y1, x2, y2], device=deltas.device))
output_boxes = torch.stack(output_boxes_list, dim=0)
return output_boxes计算中心度
中心度 centerness 由 Delta 定义:
可以发现,centerness 的范围是 [0, 1],越接近中心,centerness 越接近1,反之越靠近边缘 centerness 越小,下面是一张更加形象的热力图解释,颜色越红表示中心度越高,越蓝表示中心度越低:
TIP
- 为什么需要中心度?
- 中心度的引入可以过滤掉低质量的 box,即 ,如果中心点太接近边缘,centerness 的得分就会比较低,从而使得总得分较低,实现过滤。
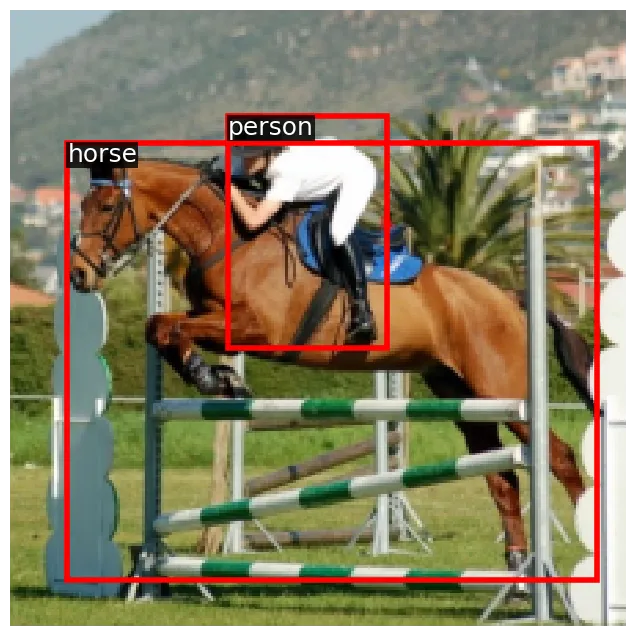
是否引入中心度对模型预测正确率的影响:
中心度计算代码如下:
def fcos_make_centerness_targets(deltas: torch.Tensor):
centerness = torch.zeros(deltas.shape[0], device=deltas.device)
for i, item in enumerate(deltas):
if item[0] == -1:
centerness[i] = -1
else:
left, top, right, bottom = item
min_lr = torch.min(left, right)
max_lr = torch.max(left, right)
min_tb = torch.min(top, bottom)
max_tb = torch.max(top, bottom)
ctrness = torch.sqrt((min_lr / max_lr) * (min_tb / max_tb))
centerness[i] = ctrness
return centerness损失函数与 NMS
损失计算
上面提到,FCOS 共有3个输出维度:Object Classification, Box Regression 和 Centerness Regression。因此,总损失是以上三者的和(对于分类是背景的 box,Regression 损失计为0)。
- Object Classification
使用Focal Loss,cross-entropy loss 的一种扩展,能很好地处理分类不均衡。由于 FCOS 训练过程中目标的个数有限,绝大多数坐标点都会被归于背景,因此如果不能很好地处理分类不均的问题,模型会对每个点都输出 “Background”。
- Box Regression
使用简单的 L1 loss,从而使预测值和实际值的 LTRB Delta 距离之差最小。
- Centerness Regression
由于 Centerness 和 GT target 都是 [0, 1] 之间的实数,因此使用交叉熵损失函数(BCE)来计算损失(交叉熵损失略优于L1损失)。
NMS 非极大值抑制
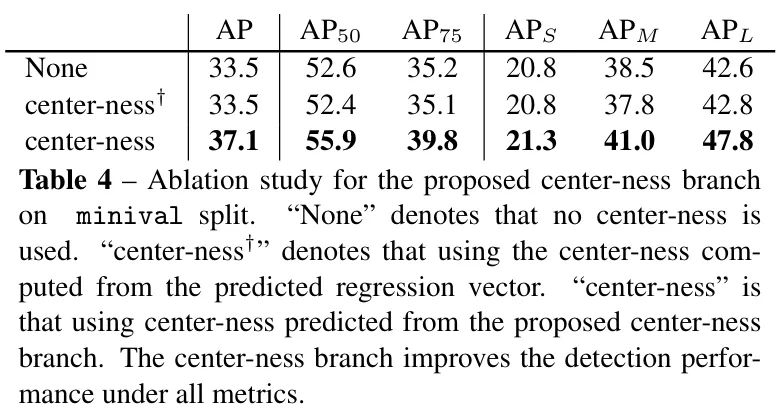
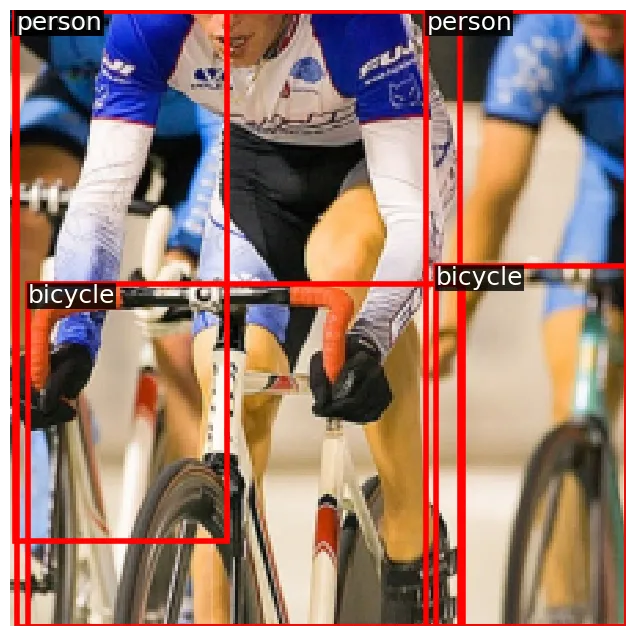
WARNING如图所示,对于一个待检测的物体,如果不引入 NMS 机制,模型极有可能产生多个位置、大小极其相似的预测框,这显然不是我们想要的结果——我们希望一个物体对应一个预测框。
NMS(非极大值抑制)的算法流程如下:
- 选定一个得分最高的 box
- 对于剩余的 box,计算他们与 的 (Intersection over Union,交集与并集的比值,越接近1说明二者重合度越高),移除 的 box
- 如果还有剩余的 box,跳转到1
这样就可以保证同一个目标周围不会出现多个预测框,从而建立一对一的映射关系。
代码实现如下:
def nms(boxes: torch.Tensor, scores: torch.Tensor, iou_threshold: float = 0.5):
if (not boxes.numel()) or (not scores.numel()):
return torch.zeros(0, dtype=torch.long)
keep = []
from two_stage_detector import iou
ious = iou(boxes, boxes)
count = boxes.shape[0]
while count > 0:
max_score_idx = torch.argmax(scores)
max_score_box = boxes[max_score_idx]
keep.append(max_score_box)
count -= 1
mask = ious <= iou_threshold
boxes = boxes[:, mask]
scores = scores[:, mask]
ious = ious[:, mask]
count = boxes.shape[0]
keep = torch.stack(keep, dim=0)
return keep完整的 FCOS 代码实现
将上述所有内容整合到一起,就能实现一个完整的 FCOS 模型啦!(适当添加了注释帮助理解)
class FCOS(nn.Module):
def __init__(
self, num_classes: int, fpn_channels: int, stem_channels: List[int]
):
super().__init__()
self.num_classes = num_classes
self.backbone = DetectorBackboneWithFPN(fpn_channels)
self.pred_net = FCOSPredictionNetwork(num_classes, fpn_channels, stem_channels)
# Averaging factor for training loss; EMA of foreground locations.
self._normalizer = 150 # per image
def forward(
self,
images: torch.Tensor,
gt_boxes: Optional[torch.Tensor] = None,
test_score_thresh: Optional[float] = None,
test_nms_thresh: Optional[float] = None,
):
"""
Args:
images: Batch of images, tensors of shape `(B, C, H, W)`.
gt_boxes: Batch of training boxes, tensors of shape `(B, N, 5)`.
`gt_boxes[i, j] = (x1, y1, x2, y2, C)` gives information about
the `j`th object in `images[i]`. The position of the top-left
corner of the box is `(x1, y1)` and the position of bottom-right
corner of the box is `(x2, x2)`. These coordinates are
real-valued in `[H, W]`. `C` is an integer giving the category
label for this bounding box. Not provided during inference.
test_score_thresh: During inference, discard predictions with a
confidence score less than this value. Ignored during training.
test_nms_thresh: IoU threshold for NMS during inference. Ignored
during training.
Returns:
Losses during training and predictions during inference.
"""
fpn_feats = self.backbone.forward(images)
pred_cls_logits, pred_boxreg_deltas, pred_ctr_logits = self.pred_net.forward(fpn_feats)
fpn_feats_shapes = {level_name: feat.shape for level_name, feat in fpn_feats.items()}
strides_per_fpn_level = self.backbone.fpn_strides
locations_per_fpn_level = get_fpn_location_coords(fpn_feats_shapes, strides_per_fpn_level, device=images.device)
if not self.training:
# During inference, just go to this method and skip rest of the
# forward pass.
# fmt: off
return self.inference(
images, locations_per_fpn_level,
pred_cls_logits, pred_boxreg_deltas, pred_ctr_logits,
test_score_thresh=test_score_thresh,
test_nms_thresh=test_nms_thresh,
)
# fmt: on
# List of dictionaries with keys {"p3", "p4", "p5"} giving matched
# boxes for locations per FPN level, per image.
matched_gt_boxes = []
B, _, _ = gt_boxes.shape
for i in range(B):
matched_gt_boxes.append(fcos_match_locations_to_gt(locations_per_fpn_level, strides_per_fpn_level, gt_boxes[i]))
# Calculate GT deltas for these matched boxes. Similar structure
# as `matched_gt_boxes` above.
matched_gt_deltas = []
matched_gt_centerness = []
for i in range(B):
deltas_dict = {}
centerness_dict = {}
for pi in matched_gt_boxes[i].keys():
deltas_dict[pi] = fcos_get_deltas_from_locations(locations_per_fpn_level[pi], matched_gt_boxes[i][pi], strides_per_fpn_level[pi])
centerness_dict[pi] = fcos_make_centerness_targets(deltas_dict[pi])
matched_gt_deltas.append(deltas_dict)
matched_gt_centerness.append(centerness_dict)
# Collate lists of dictionaries, to dictionaries of batched tensors.
# These are dictionaries with keys {"p3", "p4", "p5"} and values as
# tensors of shape (batch_size, locations_per_fpn_level, 5 or 4)
matched_gt_boxes = default_collate(matched_gt_boxes)
matched_gt_deltas = default_collate(matched_gt_deltas)
matched_gt_centerness = default_collate(matched_gt_centerness)
# Combine predictions and GT from across all FPN levels.
# shape: (batch_size, num_locations_across_fpn_levels, ...)
matched_gt_boxes = self._cat_across_fpn_levels(matched_gt_boxes)
matched_gt_deltas = self._cat_across_fpn_levels(matched_gt_deltas)
matched_gt_centerness = self._cat_across_fpn_levels(matched_gt_centerness)
pred_cls_logits = self._cat_across_fpn_levels(pred_cls_logits)
pred_boxreg_deltas = self._cat_across_fpn_levels(pred_boxreg_deltas)
pred_ctr_logits = self._cat_across_fpn_levels(pred_ctr_logits)
# Perform EMA update of normalizer by number of positive locations.
num_pos_locations = (matched_gt_boxes[:, :, 4] != -1).sum()
pos_loc_per_image = num_pos_locations.item() / images.shape[0]
self._normalizer = 0.9 * self._normalizer + 0.1 * pos_loc_per_image
pred_boxreg_deltas = pred_boxreg_deltas.view(-1, 4)
matched_gt_deltas = matched_gt_deltas.view(-1, 4)
pred_ctr_logits = pred_ctr_logits.view(-1)
matched_gt_centerness = matched_gt_centerness.view(-1)
matched_gt_boxes_one_hot = torch.nn.functional.one_hot((matched_gt_boxes[:,:,-1]+1).long(), num_classes=21)
loss_cls = sigmoid_focal_loss(pred_cls_logits, matched_gt_boxes_one_hot[:,:,1:].float())
loss_box = 0.25 * F.l1_loss(pred_boxreg_deltas, matched_gt_deltas, reduction='none')
loss_ctr = F.binary_cross_entropy_with_logits(pred_ctr_logits, matched_gt_centerness, reduction='none')
loss_box[matched_gt_deltas<0] = 0.0
loss_ctr[matched_gt_centerness<0] = 0.0
# Sum all locations and average by the EMA of foreground locations.
# In training code, we simply add these three and call `.backward()`
return {
"loss_cls": loss_cls.sum() / (self._normalizer * images.shape[0]),
"loss_box": loss_box.sum() / (self._normalizer * images.shape[0]),
"loss_ctr": loss_ctr.sum() / (self._normalizer * images.shape[0]),
}
@staticmethod
def _cat_across_fpn_levels(
dict_with_fpn_levels: Dict[str, torch.Tensor], dim: int = 1
):
"""
Convert a dict of tensors across FPN levels {"p3", "p4", "p5"} to a
single tensor. Values could be anything - batches of image features,
GT targets, etc.
"""
return torch.cat(list(dict_with_fpn_levels.values()), dim=dim)
def inference(
self,
images: torch.Tensor,
locations_per_fpn_level: Dict[str, torch.Tensor],
pred_cls_logits: Dict[str, torch.Tensor],
pred_boxreg_deltas: Dict[str, torch.Tensor],
pred_ctr_logits: Dict[str, torch.Tensor],
test_score_thresh: float = 0.3,
test_nms_thresh: float = 0.5,
):
"""
Run inference on a single input image (batch size = 1). Other input
arguments are same as those computed in `forward` method. This method
should not be called from anywhere except from inside `forward`.
Returns:
Three tensors:
- pred_boxes: Tensor of shape `(N, 4)` giving *absolute* XYXY
co-ordinates of predicted boxes.
- pred_classes: Tensor of shape `(N, )` giving predicted class
labels for these boxes (one of `num_classes` labels). Make
sure there are no background predictions (-1).
- pred_scores: Tensor of shape `(N, )` giving confidence scores
for predictions: these values are `sqrt(class_prob * ctrness)`
where class_prob and ctrness are obtained by applying sigmoid
to corresponding logits.
"""
_, _, H, W = images.shape
# Gather scores and boxes from all FPN levels in this list. Once
# gathered, perform NMS to filter highly overlapping predictions.
pred_boxes_all_levels = []
pred_classes_all_levels = []
pred_scores_all_levels = []
for level_name in locations_per_fpn_level.keys():
# Get locations and predictions from a single level.
# We index predictions by `[0]` to remove batch dimension.
level_locations = locations_per_fpn_level[level_name]
level_cls_logits = pred_cls_logits[level_name][0]
level_deltas = pred_boxreg_deltas[level_name][0]
level_ctr_logits = pred_ctr_logits[level_name][0]
# 1. Get the most confidently predicted class and its score for
# every box. Use level_pred_scores: (N, num_classes) => (N, )
# 2. Only retain prediction that have a confidence score higher
# than provided threshold in arguments.
# 3. Obtain predicted boxes using predicted deltas and locations
# 4. Clip XYXY box-cordinates that go beyond thr height and
# and width of input image.
# Compute geometric mean of class logits and centerness:
level_pred_scores = torch.sqrt(
level_cls_logits.sigmoid_() * level_ctr_logits.sigmoid_()
)
# Step 1:
most_confident_score, most_confident_class = level_pred_scores.max(dim=1)
# Step 2:
keep = most_confident_score > test_score_thresh
level_pred_classes = most_confident_class[keep]
level_pred_scores = most_confident_score[keep]
level_locations = level_locations[keep]
level_deltas = level_deltas[keep]
# Step 3:
level_pred_boxes = fcos_apply_deltas_to_locations(level_deltas, level_locations, self.backbone.fpn_strides[level_name])
# Step 4: Use `images` to get (height, width) for clipping.
level_pred_boxes[:,0].clamp_(min=0, max=W)
level_pred_boxes[:,1].clamp_(min=0, max=H)
level_pred_boxes[:,2].clamp_(min=0, max=W)
level_pred_boxes[:,3].clamp_(min=0, max=H)
pred_boxes_all_levels.append(level_pred_boxes)
pred_classes_all_levels.append(level_pred_classes)
pred_scores_all_levels.append(level_pred_scores)
# Combine predictions from all levels and perform NMS.
pred_boxes_all_levels = torch.cat(pred_boxes_all_levels)
pred_classes_all_levels = torch.cat(pred_classes_all_levels)
pred_scores_all_levels = torch.cat(pred_scores_all_levels)
keep = class_spec_nms(
pred_boxes_all_levels,
pred_scores_all_levels,
pred_classes_all_levels,
iou_threshold=test_nms_thresh,
)
pred_boxes_all_levels = pred_boxes_all_levels[keep]
pred_classes_all_levels = pred_classes_all_levels[keep]
pred_scores_all_levels = pred_scores_all_levels[keep]
return (
pred_boxes_all_levels,
pred_classes_all_levels,
pred_scores_all_levels,
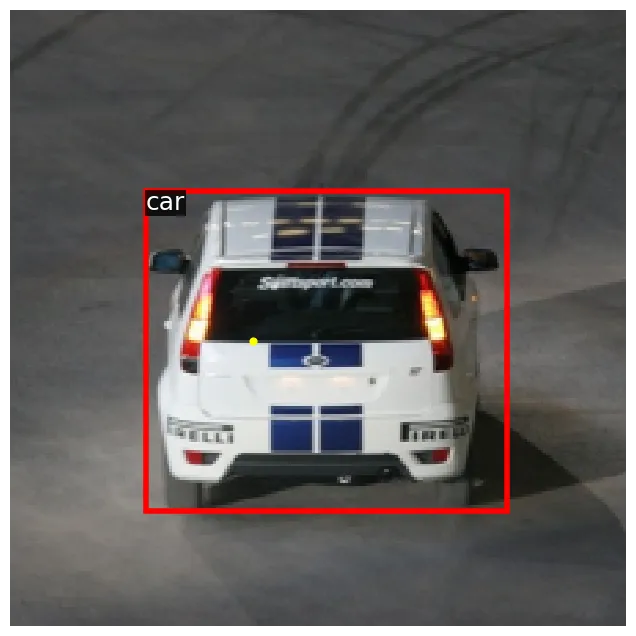
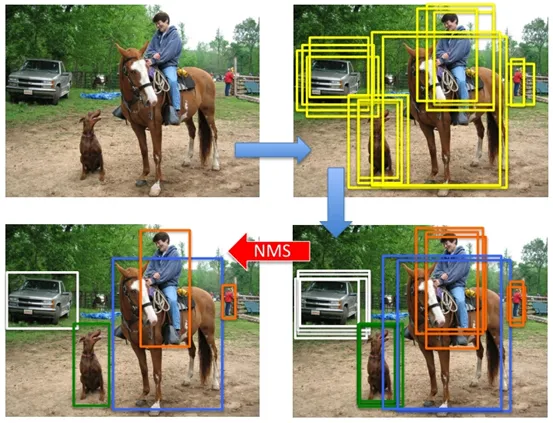
)效果示例如下:

总结
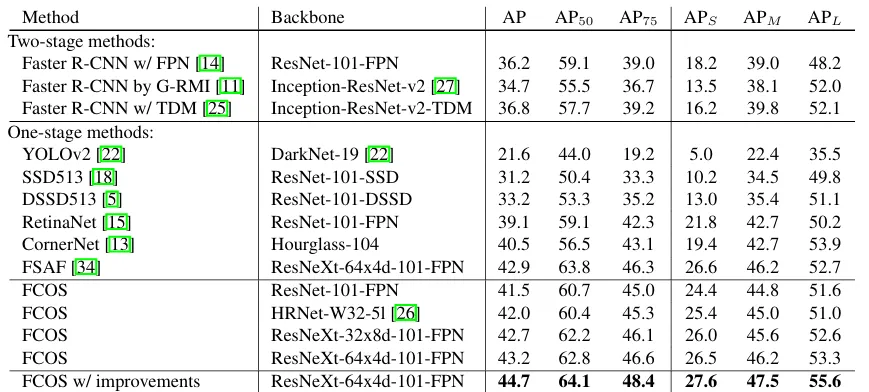
作为 Anchor-Free 的经典目标检测模型,FCOS相比于 Anchor-Based 模型极大提高了预测的正确率,在COCO数据集上的 AP 值达到 44.7%,高于 RetinaNet 5.6%, CornerNet 4.2%。FCOS以很小的设计复杂度摆脱了 Anchor-Based 模型导致的复杂计算与超参数调整,并且还可以扩展应用到二阶段检测网络,如 Faster R-CNN 的 RPN 网络中,是一个非常值得学习的目标检测模型。
IMPORTANT论文链接:https://arxiv.org/pdf/1904.01355
代码链接:https://github.com/tianzhi0549/FCOS/